
El
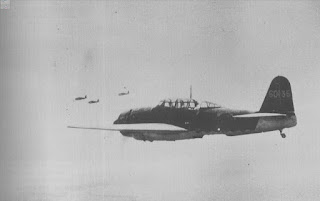
Yokosuka D4Y Suisei, fue un Bombardero en Picado de la Armada Imperial
Japonesa. El código de los aliados era "Judy". El D4Y era uno de los
bombarderos en picado más veloces de toda la guerra. A pesar de su uso
limitado, su velocidad y autonomía lo hizo eficaz en misiones de reconocimiento,
así como en ataques kamikaze. Se construyeron en varias versiones hasta un
total de 2.038 ejemplares, la mayoría por Aichi.
Historia
Desarrollo
No tan
conocido como su antecesor, el famoso Aichi D3A “Val” (el avión del Eje que más
tonelaje de buques aliados hundió durante la II GM), el Yokosuka D4Y fue el
encargado de reemplazar a este confiable pero ya superado avión a partir de
1943, en un momento en el que la etapa de espectaculares triunfos japoneses en
el Pacífico y el Sudeste Asiático ya había terminado, y los japoneses se
hallaban ahora a la defensiva frente al cada vez más imparable empuje del
contraataque norteamericano.
Carente
por tanto de las mismas condiciones favorables que el “Val”, el Suisei se vio
obligado a desempeñar su misión en cielos plagados de cazas hostiles contra los
cuales sus propios cazas de escolta, en el mejor de los casos, no eran capaces
de proveer protección suficiente.
Si bien
el Suisei adolecía de algunos defectos (por otra parte, comunes a muchos
aviones japoneses de su tiempo) estos no apocaban sus excelentes
características, y seguramente, de haber combatido en otra situación, hubiera
logrado emular los éxitos del aparato al que reemplazaba. Con todo, el D4Y,
“Judy” para los aliados, cosechó algunos logros notables y cumplió dignamente
su papel, mereciendo (como tantos otros aviones nipones) una suerte mucho mejor
de la que finalmente tuvo.

El
Suisei es también notable por otro hecho: se trata de uno de los dos únicos
aviones de combate importantes del Japón en ir propulsado por un motor enfriado
por aire durante la II Guerra Mundial (el otro fue el caza Kawasaki Ki-61 Hien
del Ejército).
La
génesis de este aparato de bombardeo en picado y ataque comenzó en 1938, cuando
la Marina Imperial adquirió uno de los prototipos del avanzado bombardero en
picada alemán Heinkel He-118. Junto con este prototipo (el V4) Japón adquirió
los derechos de fabricación y desarrollo del modelo.
El
avión germano demostró poseer unas características muy prometedoras para su
época. Propulsado por la versión Aa del famoso motor en “V” invertida
Daimler-Benz Db-601 (el mismo que propulsaría a los Messerschmitt Bf-109 a
partir del modelo E) con una potencia de 1175 hp, el bombardero Heinkel alcanzó
los 418 km/h de velocidad máxima durante las pruebas. Muy impresionado por
estas actuaciones, el Alto Mando de la Marina Imperial planeó de inmediato la
fabricación en serie de una versión basada en portaaviones del diseño alemán.
El
prototipo adquirido, redesignado por los nipones como DXHe-1, fue sometido
continuamente a pruebas hasta que se estrelló en vuelo debido a fallos
estructurales. Esto no disminuyó el interés de la Marina, que deseaba una
versión propia del DXHe-1 como bombardero en picado de alta velocidad para
equipar a sus portaaviones en reemplazo del D3A, que por esos momentos estaba
entrando en servicio. Para este cometido, se instruyó al Dai-Ichi Kaigun Koku
Gijisusho (1er Arsenal Técnico Aeronaval de la Marina) de Yokosuka para que
desarrollara una versión de este avión, aunque más pequeña a fin de acomodarse
en los citados buques.

El
requerimiento para este tipo de avión fue emitido formalmente como 13-Shi, en
1938, y solicitaba que el aparato alcanzara una velocidad máxima de 518 km/h,
una velocidad de crucero de 427 km/h, un alcance máximo, sin carga operativa,
de 2222 km, y un alcance operacional, con carga de 250 kg. de bombas, de 1482
km. El desarrollo del avión quedo a cargo de un equipo de diseñadores bajo la
guía del ingeniero Masao Yamana.
El
diseño creado por este equipo resultó extremadamente elegante: se trataba de un
monoplano de líneas muy limpias, con ala de implantación media-baja cantilever
(equipada con 3 frenos aerodinámicos para el bombardeo en picado), tren de
aterrizaje retráctil (de configuración clásica) y una tripulación de dos
personas que se acomodaban en tandem dentro de un largo cockpit, cubierto por
una cabina alargada y aerodinámica, que ofrecía una muy buena visibilidad.
Dentro de su fuselaje, de construcción enteramente metálica, iba ubicada una
estiba ventral en la cual podía llevarse una bomba de hasta 500 kg, y de esa
manera la carga útil del avión no entorpecería con sus cualidades
aerodinámicas.

Además
de su carga de bombas, el bombardero llevaba como armamento dos ametralladoras
Tipo 97 de 7,7 mm en el morro, y una de 7,92 mm Tipo 1, en posición defensiva
en la parte trasera de la cabina, manejada en vuelo por el navegador. La
envergadura del nuevo avión era incluso más pequeña que la del A6M Zero, por
tanto, la instalación de un sistema de plegado del ala se hizo innecesaria. De
hecho, el nuevo modelo era bastante más pequeño que el He-118 original (con una
envergadura acortada en 4,5 metros y un largo menor en 1,6 metros al del avión
germano) y también era más liviano. A pesar de esto, el diseño del equipo de Yamana
podía llevar una carga de combustible igual a la del mucho más grande D3A1.
Su
característica más notable para la época era la de ser propulsado por un motor
lineal, en una época en que todos los modelos japoneses de última generación
eran propulsados por motores radiales refrigerados por aire. El motor destinado
a impulsarlo era el Aichi AE-1 Atsuta de 12 cilindros en V invertida, versión
construida con licencia del DB-601 teutón. Sin embargo, este motor no estuvo
disponible a tiempo, por lo que los primeros 5 prototipos volaron finalmente
con motores alemanes DB-600G, de 960 hp, adquiridos directamente a la
Daimler-Benz, los que impulsaban una hélice tripala metálica de paso constante.
El
primer prototipo del avión, que fue denominado D4Y1 por la armada, estuvo listo
en noviembre de 1940, y realizó su vuelo inaugural el mes siguiente. A pesar de
que el DB-600G ofrecía unas prestaciones un 20% inferiores a las esperadas del
Atsuta, las características de vuelo superaron las expectativas más optimistas
del Alto Mando. El avión superaba ampliamente la velocidad máxima especificada
en el 13-Shi, y era muy maniobrable y de fácil manejo. Entusiasmada por esto,
la Marina ordenó acelerar el proceso de pruebas, y durante los meses siguientes
se entregaron otros 4 prototipos más, todos propulsados por el motor alemán.
Lamentablemente, durante las pruebas de bombardeo en picada se detectaron los primeros problemas, en forma de fenómenos de flutter en el ala, que provocaron aplastamientos en los largueros. La producción en serie, que había sido encargada a la Aichi en su planta de Nagoya, sufrió entonces retrasos, debido a la necesidad de reforzar la estructura alar, y durante algún tiempo el futuro del programa pareció estar en peligro. Con todo, y debido a las excelentes prestaciones en velocidad, maniobrabilidad, techo máximo y alcance del D4Y1, se consideró aconsejable ponerlo en producción como aparato de reconocimiento embarcado, y con ese destino comenzaron a salir de fábrica, en la primavera de 1942, los primeros D4Y1 de serie, que diferían del prototipo en ir propulsados ya por motores Atsuta, del modelo AE1A Atsuta-12 de 1200 caballos.
Historia
Operativa
Tres de
estos ejemplares de pre-producción, adecuadamente equipados con una cámara
fotográfica en la parte posterior del fuselaje, fueron los primeros en entrar
en acción, embarcados en el portaaviones Soryu durante la Batalla de Midway, en
junio de 1942. Como es sabido, durante esa batalla, los japoneses solo
detectaron a los portaaviones norteamericanos demasiado tarde, cuando ya los
ataques de los bombarderos en picada lanzados por los norteamericanos estaban
en camino. Esto les costó a los japoneses la pérdida de los portaaviones Akagi,
Kaga y del mismo Soryu. Entretanto, ya un hidroavión del crucero Tone había
avistado a los portaaviones norteamericanos, y un solitario D4Y1 del Soryu
también lo hizo poco después, pero no pudo comunicar el avistamiento por un mal
funcionamiento de su aparato de radio. Sin embargo, cuando este avión volvió a
su barco, el portaaviones japonés estaba en llamas, y el avión de
reconocimiento hubo de aterrizar en el Hiryu, gemelo del Soryu, que había
escapado a los ataques por hallarse cubierto por un manto de nubes.

De
todas maneras, este aparato también se perdió al día siguiente, cuando con un
nuevo ataque aéreo los norteamericanos echaron a pique al Hiryu (no antes de
que un ataque de este último dejara fuera de servicio al Yorktown, que luego se
hundiría). Así, el bautismo de fuego del diseño no fue demasiado prometedor. A
pesar de ello la marina adoptó el D4Y como su modelo de reconocimiento
embarcado, y continuó usándolo en esta función hasta la aparición del C6N en
1944 (en una época en que, de todas maneras, ya no le quedaban portaaviones de
gran tamaño operativos). En junio de 1942 comenzó a ser producida la versión
D4Y1-C de serie, o “Avión de Reconocimiento Embarcado Tipo 2 de la Marina”, con
una cámara K-8 en el fuselaje. Durante la batalla del Mar de las Filipinas, los
portaaviones pesados de Ozawa llevaban nueve D4Y1-C junto a los Suisei de
ataque.
Entretanto,
la urgente necesidad de un reemplazo para el ya anticuado D3A2 llevó finalmente
a la entrada en servicio del modelo D4Y1 “Suisei” (Cometa). Este había recibido
las mejoras y refuerzos en el ala, los frenos de picado y la célula,
habilitándose para las funciones de bombardeo en picado para las cuales
originalmente se lo había diseñado.
La producción de esta variante, la primera específicamente de ataque, comenzó en marzo de 1943, y de inmediato empezaron a recibirlos los Kokutais de bombardeo en picado de la Armada Imperial, donde operó en principio junto al D3A2.

Los
aliados pronto se enfrentaron en combate a este nuevo aparato, al que
denominaron, de acuerdo a su sistema de designaciones (que asignaba nombres de
mujeres a los bombarderos y aviones de ataque) como “Judy”. Pronto el avión
japonés participó de los duros combates en las Gilbert, las Marshall y Truk,
contra una U.S. Navy cada vez más poderosa y a la ofensiva.
El
diseño pronto reveló sus cualidades y sus defectos: por un lado, era un avión
extremadamente rápido y maniobrable, con buenas prestaciones de techo, alcance
y carga útil. Por otro lado, sin embargo, muchas concesiones se habían hecho a
fin de lograr estas capacidades, y el Suisei era terriblemente vulnerable una
vez alcanzado, al carecer casi totalmente de blindaje y de tanques de
combustible autosellables. Otra de sus desventajas era la poca confiabilidad
del motor, propenso a fallos y roturas, y el difícil mantenimiento de éste por
los mecánicos japoneses, acostumbrados a motores de refrigeración por aire.
Era, en
definitiva, un buen avión, algo penalizado por su mecánica, pero sin embargo
muy capaz de cumplir su tarea, siempre y cuando contara con una adecuada
escolta de cazas. Lamentablemente para los japoneses, en un momento en que los
Hellcat y Corsair estadounidenses se imponían ya plenamente a sus cazas Zero,
esto muchas veces, no era posible, y los D4Y sufrieron fuertes pérdidas durante
esas campañas, tanto en el aire como en tierra.

Mientras
tanto había continuado el desarrollo del modelo, y el modelo D4Y1-KAI
(mejorado) disponía de uniones para lanzamiento con catapultas, a fin de operar
desde portaaviones pequeños. Ese fue el último desarrollo de la serie D4Y1 que
concluyó con la construcción de unos 660 aparatos, por la Aichi, en Nagoya, más
un número indeterminado de aparatos producidos por el 1º Arsenal Aeronaval, en
Hiro (que se había sumado a la fabricación del modelo, en un intento por
construir el mayor número posible en poco tiempo).
La
siguiente versión del Suisei, un verdadero salto adelante en la serie, fue
denominada D4Y2 Modelo 12, e iba propulsado por la nueva versión AE1-P modelo
32 del Atsuta, de 1400 hp. Este nuevo y más potente motor aumentó la velocidad
de punta del Judy hasta los 579 km/h, más rápido, de hecho, que el A6M5 Zero, y
más de 140 kilómetros por hora más veloz que el nuevo bombardero en picado
estadounidense, el SB2-C Helldiver (aunque éste último, ya en su versión
inicial C1 podía transportar una carga máxima de bombas un 30% más pesada).
Este
mejorado Suisei comenzó a salir de las líneas de ensamblaje en abril de 1944, y
sería fabricado por Aichi hasta un total de 326 unidades, a las que se sumarían
las fabricadas en Hiro. Del D4Y2 pronto aparecieron nuevas versiones: el
D4Y2-KAI Modelo 22 tenía, al igual que la versión homónima del D4Y1, soportes
para permitir el lanzamiento con catapultas. De estas dos variantes
aparecieron, a su vez, los D4Y2a y D4Y2a-KAI, en los cuales la ametralladora
defensiva de 7,92 mm era reemplazada por una Tipo 2 de 13 mm. También existió
la versión D4Y2-C, variante de reconocimiento del Modelo 12.

Los Judy modelo 12 y 22 fueron prontamente distribuidos a las unidades terrestres de la 1ra. Koku-Kantai (Flota Aérea) y a las embarcadas en la 1º Kido Kantai (Flota Móvil) de portaaviones, del Almirante Ozawa, justo a tiempo para participar de la más grande batalla de portaaviones de la guerra: la Batalla del Mar de las Filipinas.
A
partir del comienzo de los ataques aéreos norteamericanos sobre los aeródromos
japoneses en las Islas Marianas, unidades de bombardeo en picado equipadas con
el Suisei, y operando desde estas mismas islas, así como desde Yap, en las
Carolinas Occidentales, comienzan a realizar ataques contra la T.F.58 de
Mischter, sufriendo severas pérdidas en el proceso, tanto en el aire, contra
las Hellcat norteamericanos, como en tierra, durante los raids contra sus
aeródromos. A pesar de esto logran un par de éxitos, y el 17 de junio, una
formación de 17 Suisei basados en Yap (y acompañados por bimotores P1Y y cazas
A6M) dañan gravemente al portaaviones de escolta U.S.S Fanshaw Bay (CVE-70) el
cual se ve forzado a retirarse a Pearl Harbour para reparaciones. Las pérdidas
sufridas, sin embargo, fueron bastante graves en éste y otros ataques. Pero lo
peor aún estaba por llegar.

El 19
de junio comienza la batalla propiamente dicha, y ya por la mañana, un par de
Hellcat abaten uno de los Judy de reconocimiento de Ozawa. Más tarde, durante
esa misma mañana y la tarde siguiente, el aproximadamente centenar de Suisei
embarcados en los portaaviones japoneses formarían parte de las 4 oleadas de
ataque lanzadas contra los portaaviones de la US Navy.
Terriblemente
superados en número por los Hellcat enemigos, y con sus propios Zero ya
superados y en muchas ocasiones deficientemente pilotados, incapaces de
proporcionarle una protección eficaz, las escuadrillas de ataque niponas fueron
masacradas.
El
D4Y2, muy vulnerable al impacto de las armas enemigas, se convirtió en una
presa fácil para los cazas estadounidenses, que atacaron sus formaciones
prácticamente con impunidad. Las pérdidas sufridas por los Suisei son terribles
(dos pilotos norteamericanos, Alexander Vraciu y Wilbur Webbs, derribaron ellos
solos 6 de los bombarderos en picado Yokosuka cada uno) así como lo son las de
los demás modelos participantes en el ataque.
Los Judy lograron un par de éxitos parciales, causando daños de menor entidad a los portaaviones Wasp y Bunker Hill, y, con un poco más de suerte, podrían haberles provocado heridas mucho mayores. Pero esto es un triste consuelo ante la magnitud de las pérdidas sufridas por los aviadores de la Kido Kantai durante la batalla: al terminar el día 19, más de 276 de los aviones embarcados nipones se habían perdido, junto con la mayoría de sus pilotos.
Aún más
aviones se fueron a pique con los portaaviones Taiho y Shokaku, hundidos por
submarinos norteamericanos ese mismo día, y todavía otros más se perderían al
día siguiente, durante un contraataque norteamericano que hundió al Hiyo y dañó
a otros buques, terminando de sellar la total derrota japonesa. Luego de la
Batalla del Mar de las Filipinas, la fuerza de portaaviones japonesa dejaría,
prácticamente, de contar en el teatro de operaciones, lo cual sin embargo no
significó en absoluto el final de la carrera del Judy.
Mientras
estos hechos acontecían, los japoneses seguían modificando y mejorando al
Suisei, introduciendo nuevas versiones y adaptándolo a nuevas funciones. Una de
ellas fue quizás la más extraña de las conversiones del modelo: el D4Y2-S Suisei-E,
de caza nocturna.
En esta
versión se había removido el equipamiento para operaciones embarcadas, así como
los soportes para bombas, y la estiba principal había sido sellada. La
ametralladora defensiva de 7,92 mm fue retirada. En cambio, se instaló en la
parte trasera del fuselaje, detrás de la cabina de pilotaje, un cañón de 20 mm
Tipo 99 Modelo 2, en configuración similar a la alemana Schräge Musik (Música
de Jazz) es decir, disparando oblicuamente hacia adelante y arriba, para
golpear a los bombarderos enemigos en su vulnerable barriga.
Una
instalación similar, aunque más pesada, ya había sido instalada en el caza
bimotor J1N1 Gekko, con bastante éxito. Lamentablemente, esto no se repitió en
el Suisei-E, ya que el modelo carecía tanto de radar como de la trepada
suficiente para ser un interceptor eficaz. El número producido de esta versión
(en realidad, ejemplares convertidos desde D4Y2 de serie) fue, por lo tanto,
pequeño. Algunos de los D4Y2-S llevaron instalaciones para cohetes aire-aire de
10 cm en las alas.

Un
desarrollo mucho más importante estuvo relacionado con la planta motriz del
avión. Como ya se ha dicho, el Atsuta había demostrado ser poco fiable y de
difícil mantenimiento en combate, y esto llevó al equipo de diseño de Aichi a
modificar la célula a fin de poder adaptarle un nuevo motor radial, más fiable.
El desafío era no perjudicar las sobresalientes prestaciones del aerodinámico
Suisei al realizar estas modificaciones.
El
motor elegido fue el Mitsubishi MK8P Kinsey 62, de 14 cilindros, con una
potencia de 1560 hp. Tomando en cuenta la delgadez del fuselaje original, los
ingenieros lograron encajar el motor en el fuselaje del D4Y2, diseñando un
radiador de baja resistencia aerodinámica, con una entrada de aire para el
supercargador incluida en el labio superior de éste (a la manera del caza N1K1
Shiden). Las pruebas de vuelo demostraron que el nuevo modelo era similar en
prestaciones al D4Y2, con incluso una pequeña mejoría en cuanto a trepada, y
solamente pequeñas pérdidas en cuanto a techo y velocidad máxima. Como único
punto en contra destacable, puede mencionarse la pérdida de visibilidad
delantera y hacia abajo del piloto, causada por la nueva trompa de mayor
tamaño.
El
Kinsey era mucho más fiable que el Atsuta (algo muy importante en un avión
embarcado monomotor) y la nueva versión, denominada D4Y3 Modelo 33, comenzó a
salir de las plantas de Nagoya e Hiro en marzo de 1944. Pronto apareció la
versión D4Y3a Modelo 33-A, la que, al igual que sus equivalentes anteriores,
montaba una ametralladora de 13 mm en reemplazo de la defensiva de 7,92 mm.
Algunas de las últimas series llevaron unidades de cohetes RATO (Rocket Assisted Take Off) para posibilitar el despegue desde portaaviones pequeños. A partir de agosto de ese año, fecha en que finalizó la producción de los D4Y2 equipados con motor Atsuta, el Modelo 33 se convirtió en la única versión de producción del Suisei, hasta la aparición de los D4Y4 finales.
El
total de ejemplares producidos por Aichi fue de 536 hasta febrero de 1945, más
un indeterminado porcentaje de los 231 Suisei producidos en Hiro. Mientras
tanto, en el frente de combate, las unidades equipadas con el modelo
continuaban entrando en desigual lucha contra los norteamericanos. Tras la
caída de las Marianas en su poder, estos iniciaron el avance hacia las
Filipinas. Los D4Y agrupados en los Kokutais de la 1ra Koku-Kantai (en las
Filipinas) y de la 2da Koku Kantai (en Formosa), así como los destacados en las
Ryukyus, sufrieron los embates de los portaaviones estadounidenses a sus bases,
en septiembre-octubre de 1944, y muchos aparatos se perdieron.
Como
anteriormente, los japoneses se vieron imposibilitados de montar un
contraataque eficaz. En septiembre de ese año los aliados capturan Peleliu, en
las Palaus, Morotai y el fondeadero de Ulithi, en las Carolinas, completando la
preparación para los desembarcos en las mismas Filipinas. Finalmente, el 20 de
octubre, las fuerzas norteamericanas, fuertemente protegidas por la flota del
almirante Nimitz, comienzan el desembarco en Leyte, en el extremo occidental de
las Filipinas.
Los
japoneses reaccionan rápidamente, tratando de concentrar al máximo sus vapuleadas
fuerzas y dirigiendo el poderío de los buques de batalla de su flota hacia la
zona, en un plan que fue denominado simplemente Sho-1 (Victoria 1). Los
portaaviones operativos restantes (Zuikaku, Chiyoda, Chitose y Zuiho),
nuevamente al mando de Ozawa, no cumplen un rol predominante en los planes
nipones: en cambio, su tarea es hacer de señuelo para alejar a los portaaviones
norteamericanos de los grupos de desembarcos que estos protegen, a fin de
permitir a las dos flotas de batalla, que incluyen la totalidad de los
acorazados japoneses, destruirlos.
A bordo
de los 4 portaaviones se encontraban los mermados efectivos aéreos embarcados
nipones, nada más que 116 aviones, de los cuales solo siete eran D4Y. La
batalla, que fue luego conocida como Batalla del Golfo de Leyte, se dividió
entre 4 enfrentamientos aeronavales principales entre, el 23 y 26 de octubre de
1944 (combates del mar de Subiyán, estrecho de Surigao, isla de Samar y Cabo
Engaño) y terminó en desastre para la Rengo Kantai, que pierde, ante los
aviones y buques norteamericanos, 3 de los acorazados, los 4 portaaviones, 10
cruceros y 11 destructores.
Los
norteamericanos también pierden un cierto número de buques, cuando una de las
Fuerzas de Interdicción japonesa logra su objetivo de sorprender a los grupos
de desembarco, pero una combinación de suerte, errores japoneses y la
desesperada resistencia de los destructores y portaaviones de escolta evitan un
desastre y completan la total derrota de la Marina Imperial, que ya no contará
en adelante con poder para amenazar a los norteamericanos.
En
estos tremendos combates, los Judy embarcados participan solamente en débiles
ataques contra los buques norteamericanos, sin causar ningún daño y sufriendo
en cambio fuertes bajas. Para los Suisei basados en tierra la suerte no es
mucho mejor, sufriendo graves pérdidas los aparatos de la 2º Koku-Kantai en sus
ataques contra los portaaviones norteamericanos. A pesar de esto, un solitario
Judy logra, el día 24, alcanzar con dos bombas de 250 kilos al portaaviones
U.S.S Princenton, el cual finalmente se hunde a causa de los incendios y
destrucción que estas le provocan.

La
Batalla del Golfo de Leyte es también conocida como el debut de una nueva arma,
los Kamikaze (Viento Divino), es decir, aviones cargados de bombas y tripulados
por pilotos suicidas, con el objetivo de impactar contra los buques enemigos.
Este nuevo método de ataque aéreo consigue, inicialmente, un considerable
éxito, hundiendo al portaaviones de escolta USS St. Lô y dañando otros cuatro,
el 25 de octubre de 1944.
Entre
los aviones participantes en estos ataques se encontraba un cierto número de
Suisei, de los cuales dos se estrellan contra el portaaviones Kalinin Bay,
causándole fuertes daños y dejándolo temporalmente fuera de acción. A partir de
este momento, los japoneses adoptan los ataques kamikaze como práctica
estándar, y continuarán realizándolos a lo largo de toda la campaña de las
Filipinas, así como las posteriores de Iwo Jima y Okinawa, causándoles graves
daños a los estadounidenses. Precisamente para este cometido es que aparece, en
febrero de 1945, la última versión de producción del Judy, la D4Y4.
Anteriormente los D4Y habían sido utilizados esporádicamente como kamikazes en
varias ocasiones, pero el nuevo Suisei, el Modelo 43, estaba destinado
específicamente para este cometido. La tripulación había sido reducida a
solamente una persona, y la ametralladora defensiva de 13 mm fue, por tanto,
removida.
En
cambio, la carga máxima ofensiva fue aumentada a una sola bomba de 800 kg,
semiencastrada dentro del fuselaje. Los D4Y4 también llevaban unidades RATO,
tanto para acortar la distancia de los despegues como para acelerar la picada
final contra el buque enemigo.
Las
prestaciones, sobre todo en velocidad máxima y trepada, se vieron algo
reducidas por la nueva carga, más pesada. De todas maneras, siendo el Modelo 33
un arma de un solo uso, esto no pareció demasiado importante. El uso de este modelo,
y de los Suisei anteriores, alcanzaría algunos éxitos, incluyendo daños al
portaaviones norteamericano Enterprise, y al británico Illustrious, así como a
muchos otros buques menores.
El
total de ejemplares producidos fue de 296, todos por la Aichi, a partir de
febrero de 1945 y hasta el final de la guerra. Sin embargo, no solo en este
tipo de ataques fueron utilizados los D4Y: Muchos otros continuaron operando en
unidades convencionales, basados en tierra, y combatieron durante los más de 6
meses que duró la campaña de reconquista por parte norteamericana de las
Filipinas, así como en los combates subsiguientes.
A pesar
de sufrir, como era esperable, graves bajas, los Judy alcanzan un par de
triunfos, incluyendo el casi hundimiento del U.S.S Franklin (CV-13) por dos
bombas lanzadas por un D4Y el 19 de marzo de 1945, cuando el portaaviones se
encontraba lanzando ataques contra los aeródromos en el propio Japón. En este
ataque pierden la vida 724 tripulantes, y otros 265 son heridos, siendo
retirado el buque de los combates para extensas reparaciones. El 18 de Mayo,
otro Judy causa daños menores al USS Yorktown (CV-10). Otros muchos ataques, en
general menos exitosos, se llevan a cabo contra los buques aliados hasta la
rendición de Japón, en septiembre de 1945.
Para ese momento, una nueva versión del Suisei estaba en desarrollo, la D4Y5 Modelo 54. Esta debería de haber representado un nuevo salto hacia delante, al ir propulsada por el potente motor radial Nakajima JK9-C Homare 12, de 1825 hp, que propulsaría una hélice metálica de 4 palas de velocidad constante. Además, este nuevo Suisei hubiera solucionado por fin los problemas de falta de protección del diseño, ya que llevaba más blindaje para la tripulación y, por fin, tanques de combustible autosellables. Sin embargo, el prototipo de este avión aún estaba en construcción al terminar la guerra.
En
definitiva, el D4Y fue un buen avión de ataque, que en general no tuvo la
posibilidad de demostrar sus capacidades reales en esta función, enfrentado a
los temibles cazas norteamericanos. En las raras ocasiones en que consiguió
evadirlos, el D4Y se demostró tan letal como su antecesor, y un más que digno
reemplazo para éste. La fabricación del avión totalizó los 2038 ejemplares,
incluyendo los prototipos.
Variantes
D4Y1:
Prototipo y primer lote de aviones fabricados en serie.
D4Y1-C:
Versión de Reconocimiento producida en la fábrica de Aichi Nagoya.
KAI
D4Y1: Prototipo de Avión Embarcado.
D4Y2
Modelo 12: Versión con Motor AE1P Aichi Atsuta 32 de 1.044 kW (1.400 hp).
D4Y2-C:
Versión del D4Y2, como Avión de Reconocimiento.
D4Y2
Modelo de 22: Versión del D4Y2 como Avión Embarcado.
D4Y2a
Modelo 12A: Versión del D4Y2 con la incorporación de una Ametralladora de 13 mm
(0.51 in) en la cabina trasera.
D4Y2
Ca: Versión del D4Y2a como Avión de Reconocimiento.
D4Y2a
Modelo 22A: Versión del D4Y2A como Avión Embarcado.
D4Y2-E-S
Suisei: Versión como Caza Nocturno.
D4Y3
Modelo 33: Versión con Motor Radial Mitsubishi Kinsei 62 de 1163 kW (1560 hp).
D4Y3a
Modelo 33A: Versión del D4Y3 con la incorporación de una Ametralladora de 13 mm
(0.51 in) en la cabina trasera.
D4Y4
Modelo 43: Versión Kamikaze.
D4Y5
Modelo 54: Versión con Motor Radial Nakajima Homare.
Usuarios
Japón:
Fuerza Aérea de la Armada Imperial (Primero Koku Sentai, Segundo Koku Sentai y
Tercero Koku Sentai).
Estados
Unidos: Armada de los Estados Unidos (Opera aviones capturados con fines de
evaluación).
Especificaciones
técnicas

País:
Japón.
Tipo:
Bombardero en Picado.
Fabricante:
Yokosuka.
Primer
Vuelo: Diciembre de 1940.
Introducido:
1942.
Retirado:
1945.
Producción:
1942–1945.
Construidos:
2.038 Ejemplares.
Tripulación:
2 Tripulantes (Piloto y Operador de Radio/Artillero).
Longitud:
10,22 m.
Envergadura:
11,50 m.
Altura:
3,74 m.
Superficie
Alar: 23,6 m².
Peso en
Vacío: 2.440 kg.
Peso
Máximo al Despegue: 4.250 kg.
Planta
Motriz: Un Motor Aichi Atsuta 32 V12, refrigerado por líquido. Potencia: 1.400
CV. Una Hélice Tripala.
Velocidad
Máxima Operativa (Vno): 550 km/h.
Alcance:
1.465 km.
Techo
de Servicio: 10.700 m.
Régimen
de Ascenso: 14 m/s.
Carga
Alar: 180 kg/m².
Potencia/Peso:
0,25 kW/kg (0,15 hp/lb).
Armamento
Ametralladoras:
2 Ametralladoras Tipo 97 de 7,7 mm fijas sobre el motor y una de 7,7 mm
accionada manualmente desde la cabina trasera.
Bombas:
Una Bomba de 250 kg, más una bomba de 30 kg debajo de cada ala.
Fuente:
https://www.lasegundaguerra.com





